



Astrobotic and CMU Advance Nav System for Lunar Surface Ops
| Astrobotic, in partnership with Carnegie Mellon University (CMU), has successfully completed Phase II of its NASA Small Business Technology Transfer (STTR) project for Distributed Agent Localization Estimation for spaceCraft (DALEC), advancing the system from Technology Readiness Level (TRL) 3 to TRL 5. DALEC is designed to provide positioning, navigation, and timing (PNT) capabilities in environments where GPS is unavailable, including the lunar surface. DALEC helps spacecraft, autonomous vehicles, rovers, and astronauts understand where they are and where other assets are relative to them. Each asset uses its own onboard sensors such as cameras or laser scanners to estimate its position. That information is then shared wirelessly with nearby assets and combined using distributed algorithms to produce more accurate and reliable localization across the group. “Reliable positioning, navigation, and timing is foundational for shared infrastructure that multiple missions can rely on,” said Sean McGill, Senior Project Manager at Astrobotic. “DALEC supports the kind of interoperable navigation capability needed as lunar infrastructure scales and missions become increasingly interconnected. This work combines embedded systems development with advanced algorithms to address problems that single-sensor approaches cannot solve.” This collaborative approach allows multiple assets to operate as a coordinated system, sometimes described as a swarm. Working together, DALEC-enabled assets can map unknown terrain, navigate rough or poorly lit areas, plan safer routes, and coordinate tasks such as science operations, resource prospecting, construction activities, or exploration of caves and lava tubes. These capabilities are particularly important for future Artemis missions, where astronauts, vehicles, and robotic systems must operate together across large areas of the lunar surface. |
 |
Image: In a simulated test environment, a team of four self-driving rovers carried out a practice mission: building a circular dirt wall around a landing site to help shield the surrounding area from debris kicked up by future landings. The lander that brought the rovers and a nearby charging station stayed in place during the mission, giving the rovers fixed reference points to help them figure out where they were and navigate accurately. |
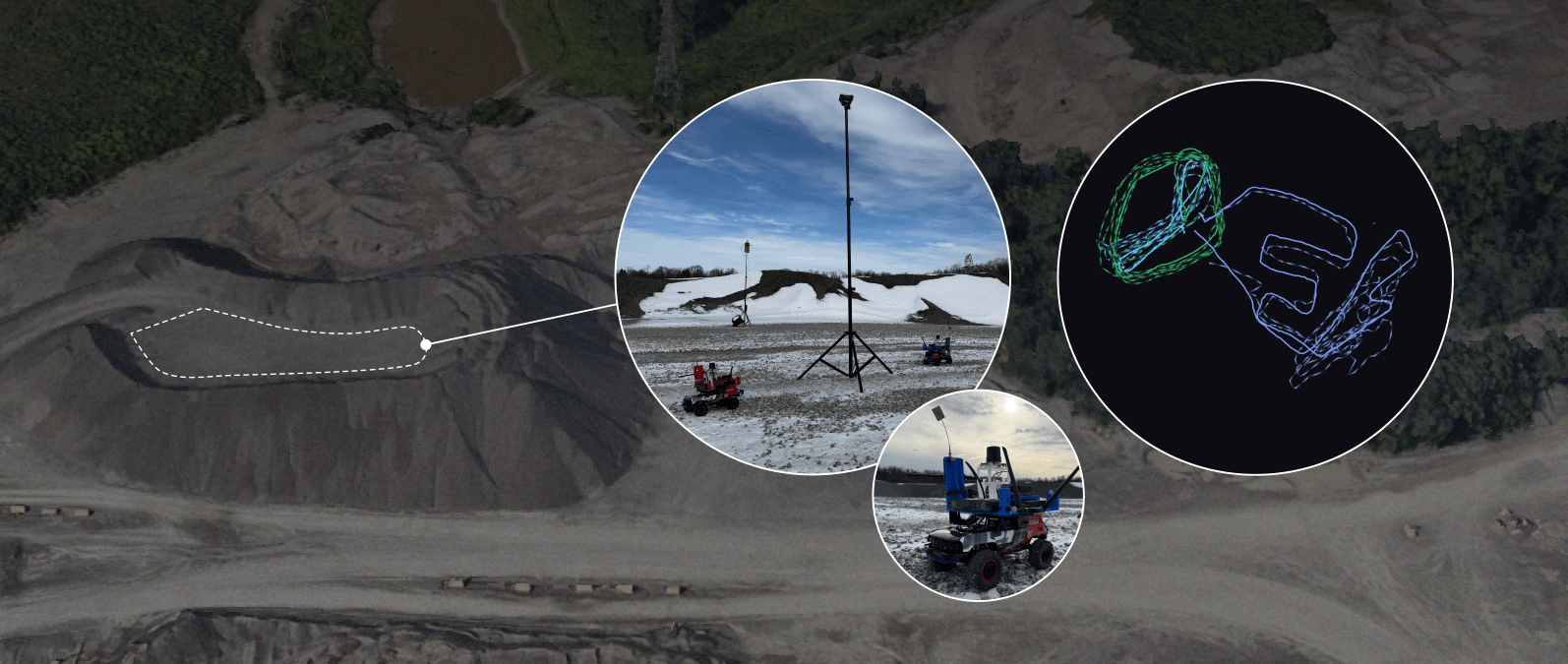
Alignment With Distributed Lunar InfrastructureDALEC is intended to serve as a core localization and mapping capability within a broader autonomous agent framework and aligns with lunar infrastructure solutions such as Astrobotic’s LunaGrid architecture. By enabling interoperable, low-bandwidth sharing of navigation data among assets, DALEC supports the development of distributed PNT infrastructure that can scale as more systems operate simultaneously on the Moon. The system combines visual odometry and other onboard sensing with ultra-wideband radio frequency ranging between agents. This fusion of sensing modalities provides robustness when individual sensors are degraded, such as in areas with uniform terrain, changing lighting conditions, or partial sensor failures. DALEC is designed as a flexible, low size, weight, power, and cost sensor package that can be integrated onto a wide range of lunar assets and communicate with any other DALEC-enabled system. Testing in Relevant EnvironmentsDuring Phase II, Astrobotic and CMU demonstrated the fully integrated DALEC system in simulation, an indoor laboratory environment, and an outdoor lunar-like test environment. Outdoor testing was conducted in a quarry selected for its rough, rocky terrain and open layout, providing a relevant analogue to lunar surface conditions. Demonstrations included multiple mobile agents and stationary landmarks sharing data over a low-bandwidth mesh network, validating the system’s distributed localization algorithms and embedded electronics platform. Key Phase II results include decentralized multi-agent localization that significantly improves position estimates compared to non-collaborative approaches, robustness to sensor dropouts, stable real-time software running on embedded Linux hardware, drop-in and drop-out capability for agents joining or leaving the network, and successful operation with minimal communication bandwidth. The project also produced multi-agent simulation tools with realistic sensor and communication modeling. The two-year Phase II effort concluded in January, meeting TRL 5 requirements. Astrobotic is evaluating next steps to further mature DALEC and explore its path toward a deployable product supporting future lunar missions and distributed PNT infrastructure. |
 |
Image: In the outdoor test environment with real hardware, just as in the simulated mission, the DALEC system allowed for accurate real-time location estimation for each “rover”, vastly improving over the raw odometry data. |
 |
| Image: The team of rovers used the DALEC technology to correct localization drift of simulated raw visual-inertial odometry. With accurate, real-time knowledge of their current location, the rovers can work more efficiently to build the protective wall (berm). |
| About Astrobotic Astrobotic is at the forefront of advancing space exploration and technology development. Our expertise spans from lunar spacecraft, navigation, and delivery to lunar infrastructure and suborbital rockets. To date, the company has been contracted for two lunar missions, and has won more than 60 NASA, DoD, and commercial technology contracts worth more than $650 million. Astrobotic recently launched and operated the first American lunar lander mission since the Apollo Program. Beyond helping lead America back to the Moon, the company develops and operates reusable vertical takeoff, vertical landing (VTVL) rockets and advanced rocket engines. Established in 2007, Astrobotic is headquartered in Pittsburgh, PA, with a propulsion and test campus in Mojave, CA.www.astrobotic.com |
Got a Questions?
Find us on Socials or Contact us and we’ll get back to you as soon as possible.